Recently, Tianjin University developed a robot system "Micro Hand" successfully, along with several key breakthroughs in minimally invasive surgical robot systems. The Tianjin University team managed to make several improvements in techniques, including a systematic lightweight design, a spatial intuitive master-slave mapping algorithm and improved safety design. They also developed core components such as the surgical instruments with full-dimensional movement and a stereo image system. The research is of great importance for it is the first mechanism for assisting thoracic and abdominal minimally invasive surgery in China.
With techniques featuring a smaller wound, less blood loss and more rapid recovery, the surgical robot “Micro hand” has extensive applications. As a master-slave robotic system, the equipment can be easily applied by surgeons to conduct complicated thoracic and abdominal minimally invasive surgeries. Thanks to the “Micro hand” robot, an off-site doctor can easily get access to the operation during the process by receiving related information and stereo images through the display window, and can operate the master manipulator to control the slave according to operation demands.

surgeon console
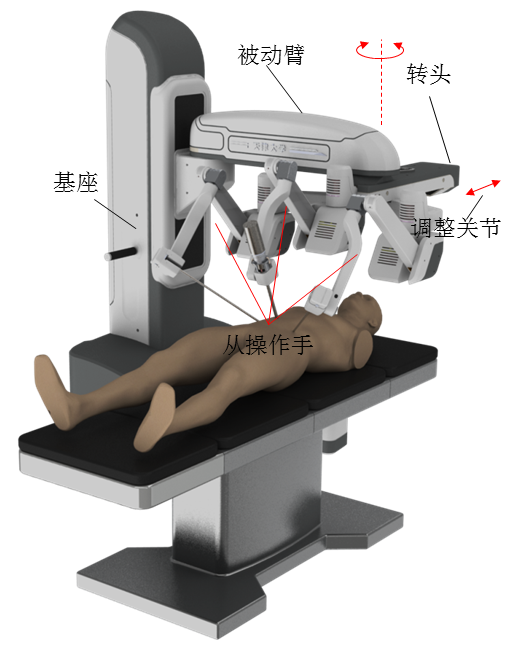
robot trolley
The “Micro Hand” robot trolley is also delicate in design. It includes the robot pedestal and a passive arm mounted on it which can move up and down. On the other end of the passive arm, there is installed a passively adjustable swivel, where three slave manipulators are installed, two of which are used for clamping the surgical instruments to conduct the operation while the other one is for manipulating the endoscope.
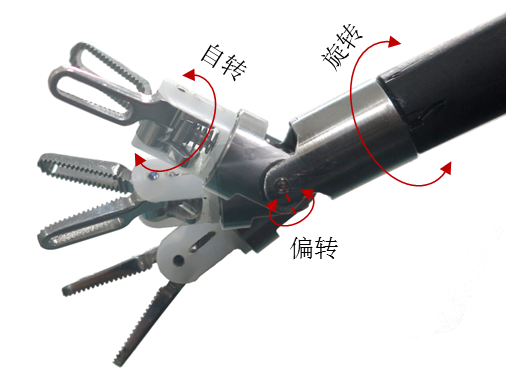
instruments with multi degrees of freedom
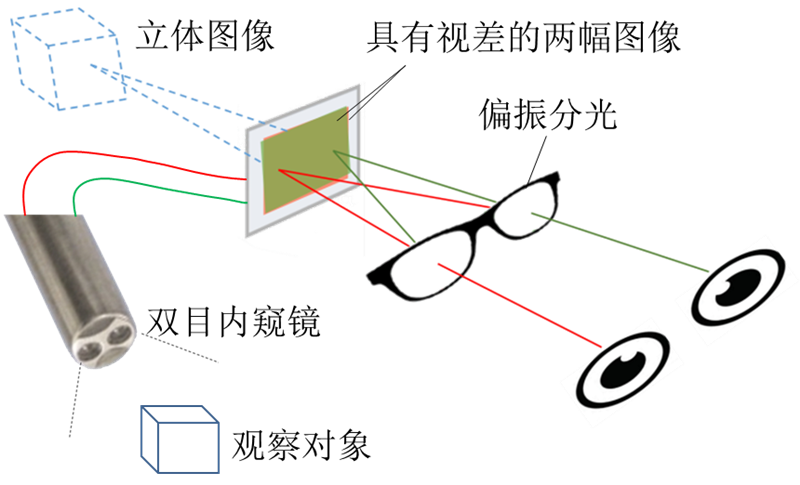
fundamental of stereo imaging
Each mechanical arm includes an actively adjustable joint and a passively adapting adjustment joint. The passive adapting joint can ensure the instrument always goes through the small incision on the body surface during the movement of the robot’s mechanical arm while the actively adjusting joint can realize real-time control of the position of surgical instruments according to the operation instructions from surgeon’s console. At the end of the instrument manipulator and the endoscope manipulator, quick changing coupling for instruments and for the endoscope are installed, which can realize quick installation and extraction of the instrument or endoscope by the corresponding mechanical arms.

Clinical demonstration environment based on minimally invasive surgical robot “MicroHand”
While continuing further research, the robot “Micro Hand” has already gone through clinical trials. The successful completion of clinical trials will further promote the industrialization of minimally invasive surgical robots in China. At present, based on the minimally invasive surgical robot “MicroHand”, there are two clinical demonstration robots for assisted minimally invasive surgery at the Beijing Second Artillery General Hospital and the Third Xiangya Hospital.
“Micro Hand” is of critical value for both scientific studies and human welfare. As minimally invasive surgery has become a future trend, an organic combination between robotics technology and minimally invasive surgery has come into its own, with the advantage of accuracy and stability of operation. The invention, which marks the start of minimally invasive surgical studies, is believed will achieve remarkable economic and social benefits. Considering the enormous number of operations that take place in China every year, causing high labor intensity to medical workers, the application of high-end equipment, especially the minimally invasive surgical robot, will make a difference, providing support for more minimally invasive disease treatment. The researchers from Tianjin University have great expectations about the future development of minimally invasive surgical robots in China.
By: Zhang Yumeng, Du Peiran, Zhao Qing
Editors: Sun Xiaofang and Ross Colquhoun
